How AI Robot Vacuums Navigate: LiDAR, SLAM and Computer Vision Explained (2026)
Updated June 2026 · 11-minute read
The difference between a cheap robot vacuum that bumps randomly around your house and a premium one that systematically cleans every room in an efficient path while avoiding your phone charger cable and your cat is almost entirely in the navigation and perception systems. These systems combine several distinct technologies that each solve different parts of the problem: knowing where you are, building a map of where you have been, identifying what is in front of you, and planning an efficient route through it all.
This article explains each technology layer: LiDAR sensors, SLAM algorithms, computer vision for obstacle detection, the AI models that classify what the camera sees, and how all of these are integrated in a device running on an embedded processor with limited compute budget and a battery that needs to last for an entire cleaning session.
The Problem: A Robot Vacuum Does Not Know Where It Is
When a robot vacuum starts a cleaning session, it faces a fundamental robotics challenge that has no trivial solution: it needs to clean an area it has never seen before (or has not seen recently, since furniture moves), while keeping track of where it is, where it has been, and where it needs to go, all using only sensors mounted on a device that sits about 8 centimetres off the ground.
This problem, knowing your own position while simultaneously building a map of the environment, is called Simultaneous Localisation and Mapping, or SLAM. It is one of the foundational problems of mobile robotics, studied since the 1980s, and solving it well is what separates navigating robot vacuums from the random-walk approach of the earliest Roombas.
LiDAR: Building a Map With Light
LiDAR stands for Light Detection and Ranging. A robot vacuum LiDAR unit is typically a rotating sensor on top of the device that fires pulses of laser light in all directions around the horizontal plane and measures how long each pulse takes to return. Since light travels at a known speed, the return time directly gives the distance to whatever the laser hit.
A single LiDAR scan produces a ring of distance measurements: this wall is 1.2 metres away, this chair leg is 0.6 metres away, this open doorway is 3.1 metres away in that direction. Rotating at 5 to 15 revolutions per second, a robot vacuum LiDAR generates hundreds of such measurements per scan, producing a detailed 2D map of the environment at the floor level of the device.
The quality of the LiDAR determines the quality of the map. Consumer robot vacuum LiDAR units achieve distance accuracy of around 1 to 5 centimetres, which is sufficient for room mapping and navigation but not for the millimetre-level precision that autonomous vehicles require. The range is typically 6 to 10 metres, which covers any residential room.
Limitations of LiDAR
LiDAR scans the horizontal plane around the robot. It does not see objects that are below its scan height (objects on the floor that are shorter than the LiDAR mounting height) or above it (items hanging from the sides of furniture that might be at robot height but extend into the path). It also struggles with highly reflective or transparent surfaces: a glass door at certain angles reflects the laser away rather than back, making the robot think there is nothing there.
These limitations are why LiDAR alone is not sufficient for obstacle avoidance, and why modern robot vacuums add camera-based systems for the detection challenges LiDAR cannot handle.
SLAM: Simultaneously Mapping and Localising
Given a stream of LiDAR measurements arriving continuously as the robot moves, SLAM algorithms do two things at once: build and update a map of the environment, and estimate the robot's current position within that map.
These two problems are entangled. To build an accurate map, you need to know your position (so you can correctly place each observation in the map). To localise yourself, you need a map to match your observations against. SLAM algorithms solve this chicken-and-egg problem through probabilistic estimation: maintaining a probability distribution over possible positions and map states, and updating it as new observations arrive.
How SLAM works in practice
When the robot starts a session, it has no map and no known position. The SLAM algorithm starts building both simultaneously. As the robot moves, wheel odometry (measuring wheel rotation to estimate displacement) gives a rough estimate of movement. LiDAR scans arrive continuously. The algorithm matches each new scan against the current map to estimate how much the robot has moved and refine the map based on the new observations.
Over time, errors in wheel odometry accumulate. If the robot's wheels slip slightly on a smooth floor, the odometry-estimated position drifts from the true position. The SLAM algorithm corrects this by matching LiDAR observations against the map: if the observations suggest the robot is slightly further left than odometry implies, the estimated position is adjusted. When the robot revisits an area it has already mapped, the SLAM algorithm can perform loop closure: recognising that the current observations match a previously mapped area and using this to correct accumulated drift.
Graph-based SLAM
Premium robot vacuums typically use a variant of graph-based SLAM. The robot's trajectory is represented as a graph of pose nodes (positions and orientations at particular moments) connected by edges that represent the estimated motion between poses. As new observations are added, constraints between poses are added to the graph. When loop closure is detected, a constraint connecting geographically close but temporally distant poses is added, and the entire graph is optimised to minimise the inconsistency between all constraints simultaneously. This produces a globally consistent map that corrects accumulated drift across the entire trajectory.
The computational cost of full graph optimisation grows with the number of poses in the graph. Embedded implementations use approximations and sparse representations to keep the computation tractable on the limited processor inside a robot vacuum.
Computer Vision: Identifying What Is in the Way
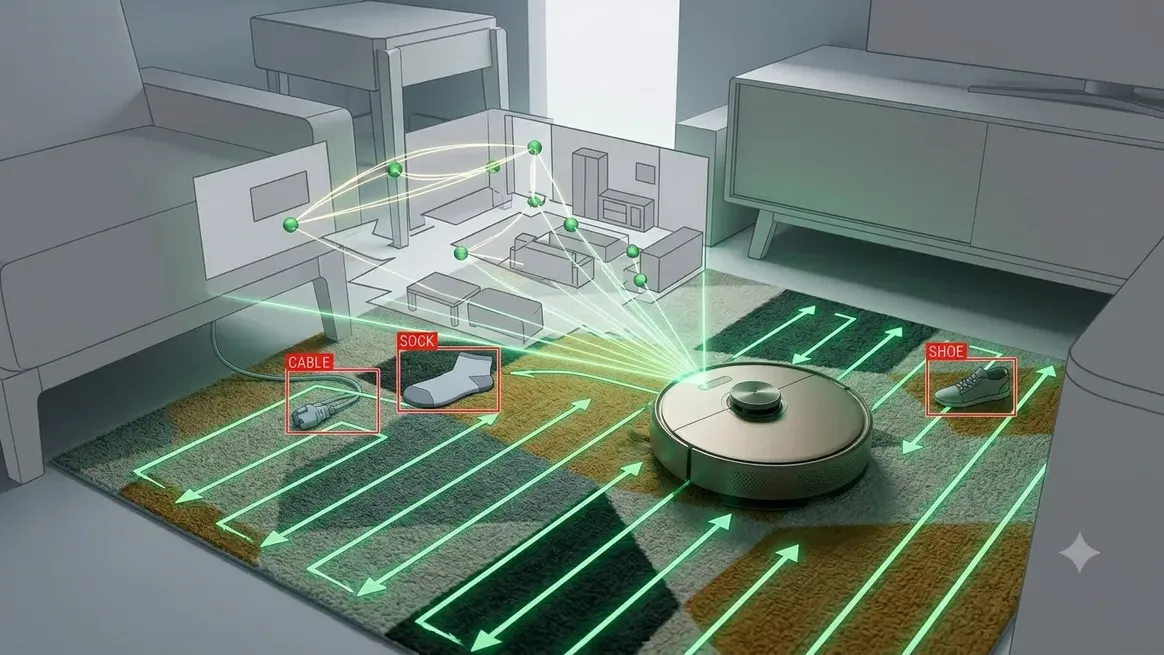
LiDAR tells the robot that something is at a given distance and angle. It does not tell the robot what that thing is. A cable on the floor, a shoe, a child's toy, and a pile of pet waste are all obstacles to a LiDAR sensor. A robot that cannot distinguish between them treats them all the same: either stopping or going around. A robot that can identify them can make more nuanced decisions: go around the cable carefully, navigate around the shoe, warn the user about the pet waste and avoid the area.
This is where computer vision and object recognition neural networks enter the robot vacuum system. A downward-facing or forward-facing RGB camera captures images of the floor and the path ahead. These images are fed to a convolutional neural network that has been trained to classify objects typically found on household floors.
What the AI recognises
Roborock's obstacle avoidance system on the Qrevo Curv 2 Flow, which they call ReactiveAI 3.0, claims to identify over 70 categories of household obstacle. The categories include: cables and charging cords, shoes and slippers, socks, toys, pet food bowls, pet waste, furniture legs, thresholds between room types, and various other commonly encountered objects. Each category may have different avoidance behaviour: the robot stops and goes around pet waste, navigating carefully around cables while trying to still clean near them.
The neural network architecture
Object recognition in a robot vacuum faces different requirements than typical image classification benchmarks. The model needs to:
Run on an embedded processor with limited compute budget
Operate at video frame rates (15 to 30 fps) to respond in time while moving
Work in varied and often poor lighting conditions (floor-level lighting is inconsistent)
Handle the specific visual characteristics of floor-level photography (foreshortening, shadows, reflections)
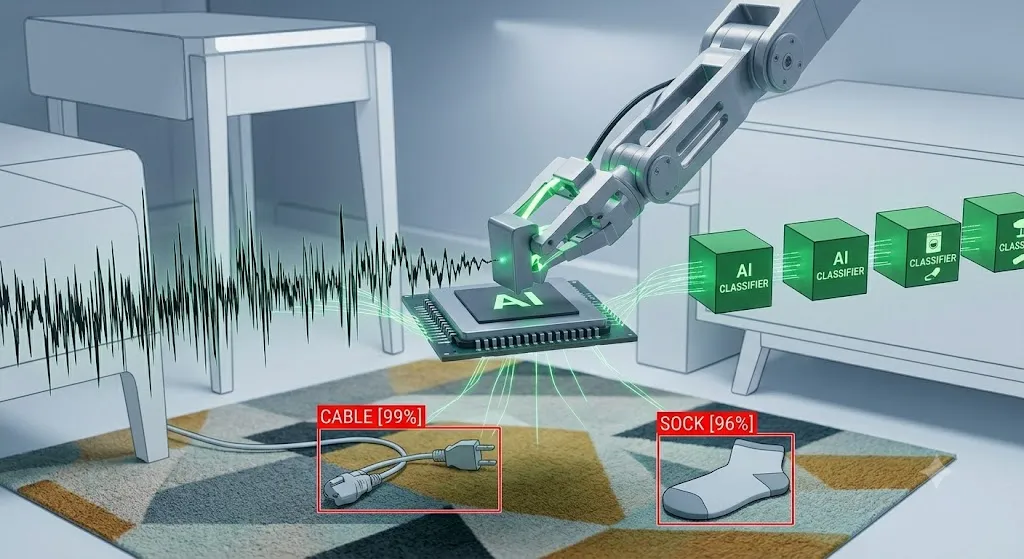
These requirements push toward lighter architectures than would be used for static image classification. MobileNet-based architectures with aggressive quantisation are common. Some implementations use a two-stage approach: a fast, cheap classifier identifies whether any obstacle is present, and only if it finds one does a more expensive classifier activate to determine the specific category. This keeps the average compute cost low while still enabling detailed classification when needed.
Path Planning: Covering Every Square Metre Efficiently
With a map of the environment and the ability to detect obstacles, the robot still needs to decide what path to take. Early robot vacuums used random walk algorithms: move in a straight line until hitting something, then turn a random amount and continue. This is simple to implement but inefficient and misses areas.
Modern robot vacuums use coverage path planning algorithms that systematically cover the entire mapped area. The standard approach is a boustrophedon pattern (from the Greek for "the way an ox ploughs a field"): the robot travels in parallel lanes across each room, similar to how a lawn mower covers a garden. This guarantees coverage of every point in the mapped area assuming the robot can navigate the turns at the end of each lane.
The path planner must also handle the interaction between the coverage plan and dynamic obstacle detection. If an obstacle is detected mid-path, the robot detours around it and then returns to continue the coverage pattern rather than abandoning the lane. This requires maintaining a local obstacle avoidance capability that operates on top of the global coverage plan.
Dirt Detection: AI That Adjusts Suction
The most sophisticated AI feature in premium robot vacuums is not navigation but dirt detection. The Roborock Qrevo Curv 2 Flow includes sensors in the suction path that detect the quantity and size of particles being vacuumed. A neural network processes this sensor data and identifies areas of concentrated debris, increasing suction power automatically when concentrated dirt is detected and reducing it on clean surfaces.
This is AI optimising cleaning performance rather than navigation. The dirt detector produces a continuous signal that the AI uses to dynamically control the motor speed, balancing cleaning effectiveness against battery consumption and noise level. Areas of concentrated dirt may also trigger the robot to make multiple passes, with the AI deciding when an area is sufficiently clean to move on.
The Embedded Processing Stack
All of the above: LiDAR processing, SLAM, computer vision inference, path planning, and dirt detection, runs on the embedded processors inside the robot vacuum. A premium robot vacuum typically has multiple chips handling different parts of this stack.
Function | Chip Type | Update Rate | Key Constraint |
|---|---|---|---|
LiDAR signal processing | Dedicated ASIC or DSP | Hundreds/second | Real-time timing |
SLAM algorithm | Application processor (ARM A-class) | 5 to 15 Hz | Memory for map |
Obstacle vision inference | Vision processor or NPU | 15 to 30 fps | Latency and power |
Path planning | Application processor | 1 to 5 Hz | Compute for planning |
Motor control | Microcontroller | Thousands/second | Real-time control |
WiFi and app connectivity | Wireless SoC | On demand | Power efficiency |
The application processor is typically an ARM Cortex-A class chip, similar to what is found in an older budget smartphone, running Linux or a real-time operating system. This gives enough computational power for SLAM and path planning while being efficient enough for the 60 to 90 minute cleaning sessions that a single battery charge needs to support.
What Separates Premium from Budget Navigation
The difference between a $200 robot vacuum and a $999 one in terms of navigation comes down to specific technology choices:
LiDAR vs gyroscope-only navigation. Budget vacuums may use gyroscopes and accelerometers without LiDAR for navigation, which produces less accurate maps and less efficient coverage. LiDAR adds cost but enables the systematic room-by-room coverage that justifies calling it intelligent navigation.
Camera resolution and neural network quality. Obstacle detection accuracy scales with camera resolution and model quality. A budget obstacle avoidance system with a low-resolution camera and a simple classifier will miss more objects and misclassify more than a premium system with a higher-resolution camera and a more carefully trained model.
Processing power. Running SLAM and computer vision simultaneously on the same processor requires compromises on update rates or model size. Premium vacuums typically have separate processors for different functions, allowing each to run at full quality simultaneously.
Training data quality. The obstacle recognition neural network is only as good as the data it was trained on. A company that has deployed millions of robots and collected diverse real-world floor images in varied lighting conditions will have better training data than a smaller company just entering the category. This is a compounding advantage for established players like Roborock and iRobot.
Frequently Asked Questions
Does a robot vacuum work better with more rooms or fewer rooms?
More rooms increase the complexity of the SLAM problem and the size of the map that must be maintained in memory. Premium robot vacuums handle multi-room apartments and houses without difficulty because their SLAM implementations are designed for this scale. Budget robots with simpler navigation may struggle in larger, more complex floor plans. If you have a large home with many rooms, checking that a robot's specifications include multi-floor mapping support is worthwhile.
Why does a robot vacuum sometimes get lost?
Robot vacuum localisation failures happen when the robot cannot match its current sensor observations to its stored map. This occurs when furniture has moved significantly since the map was created, when the robot enters an area with featureless walls that look identical from multiple angles (causing ambiguity), when LiDAR is confused by reflective surfaces, or when accumulated localisation error drifts beyond the robot's ability to self-correct. Premium robots handle these situations better through more robust SLAM implementations and the ability to detect localisation uncertainty and respond by slowing down or requesting user intervention.
What is 3D obstacle avoidance and how does it differ from 2D?
Standard robot vacuum obstacle avoidance uses a single downward-facing or forward-facing camera that gives a 2D view of obstacles directly in the robot's path. 3D obstacle avoidance uses structured light or stereo camera systems to generate depth information, creating a 3D point cloud of the area in front of the robot. This allows the robot to estimate the height and three-dimensional shape of obstacles, which helps it make better decisions about whether it can pass under something (such as a chair rung at a specific height) or needs to go around it. Some premium 2026 robot vacuums use structured light emitters paired with cameras to achieve this capability.
How does a robot vacuum know when a room is clean?
In coverage path planning mode, a room is considered clean when every point in the planned coverage pattern has been traversed. The robot tracks which parts of the coverage plan have been completed and which have been skipped due to obstacles. Some robots with dirt detection perform additional passes in areas where high dirt density was detected until the detector registers that the area is sufficiently clean. The decision to end cleaning in a given area is a combination of coverage completion and dirt detection feedback.
Technical information in this article is based on published academic literature on SLAM and mobile robotics, manufacturer technical documentation from Roborock and iRobot, and sensor specification sheets. Robot vacuum navigation technology advances with each product generation.